로봇의 진화, ‘마이크로마우스’와 ‘라인트레이서’
마이크로로봇에 지능을 부여하는 알고리즘 이용
1921년 체코의 극작가인 카렐 차페크의 희곡 R.U.R.(Rosuum's Universial Robots)에서 체코어로 강제적 노동 또는 노예를 의미하는 ‘로봇’이라는 개념이 등장한다. 이후 로봇은 전 세계인들의 가장 매력적인 캐릭터 중 하나로 자리잡는다. 대중들에게 큰 인기를 끌었던 영화 <터미네이터>, <아이 로봇> 등은 이를 잘 보여주는 예다. 이러한 영화들에서 로봇은 인간처럼 지각능력을 가질 뿐만 아니라 스스로 판단까지 한다.
인간은 영화에서나 나올 법한 이러한 로봇을 현실에 등장시켰다. 바로 ‘지능형 로봇’이다. 현재 개발된 지능형 로봇에는 가장 발전된 형태로 평가받는 일본의 ‘아시모’, 작년에 우리나라에서 개발된 ‘휴보2’ 등이 있다. 지능형 로봇은 현재 전문가들에 의해 로봇의 궁극적 형태라는 평가를 받고 있다.
이러한 지능형 로봇 분야에서도 특히나 주목을 받고 있는 로봇 형태가 있다. 바로 초소형 컴퓨터(microcomputer)에 의해 지적활동을 하는 마이크로로봇이다. 마이크로로봇은 현재 EBS에 방영됐을 정도로 대중들에게 많이 알려진 지능형 로봇의 한 형태다.
이러한 마이크로로봇 제작에 뛰어난 실력으로 주목을 받고 있는 동아리가 있다. 바로 우리대학의 마이크로로봇연구회인 ZETIN (ZEro To INfinite)이다. ZETIN은 현재 ‘마이크로마우스(micromouse)’ 부문과 ‘라인트레이서(line tracer)’ 부문에 주력하고 있다. ZETIN의 주력분야인 마이크로마우스와 라인트레이서에 대해 알아보자.
탐색 알고리즘이 핵심인 ‘마이크로마우스’
마이크로로봇의 일종인 마이크로마우스는 초소형 컴퓨터가 장착된 지능형 로봇으로 쥐(mouse)와 같은 움직임을 보인다. 마이크로마우스의 목적은 미로를 탐색해 목적지까지 가장 빠른 길을 찾아 최단 시간 안에 도달하는 것이다. 이때 마이크로마우스는 외부조정 없이 스스로 목적지에 도착해야 한다.
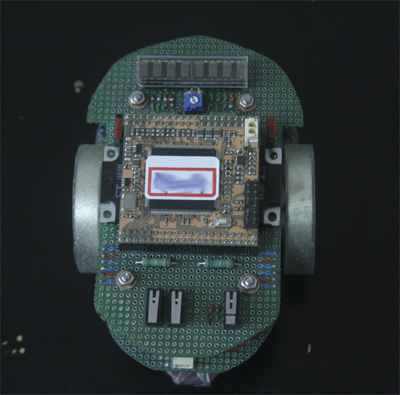
마이크로마우스는 로봇의 제어와 판단을 담당하는 제어부, 미로에 관한 정보를 파악하는 센서, 로봇을 이동시키는 구동장치 등으로 구성돼 있다. 구체적으로 마이크로마우스가 어떠한 방식으로 미로를 헤쳐나가 목적지에 도달하는지 알아보자.
마이크로마우스 주행원리의 핵심은 제어부에 있는 탐색 알고리즘(algorism)이다. 탐색 알고리즘은 외부에서 정보가 입력되면 연산을 통해 원하는 정보를 얻어내는 기술적 절차다. ZETIN 이재영(전전컴 09)회장은 “만약 마이크로마우스가 미로의 직선주로에 들어서게 되면 센서를 통해 직선주로에 대한 정보를 인식한다. 탐색 알고리즘은 이를 바탕으로 직진하라는 정보를 얻어낸다. 이렇게 알고리즘을 통해 미로의 특정장소에서 특정방향으로 나아가야 한다는 정보가 산출되면 마이크로마우스는 이를 제어부에 저장한다”고 말했다.
탐색 알고리즘에는 대표적으로 ‘무게중심법’이 있다. 미로는 바둑판 모양의 형태로 각각의 칸이 구획돼 있는데, 이 칸에는 ‘무게(weight)’라는 각 칸의 고유정보가 입력돼 있다. 무게는 마이크로마우스의 목적지에서 얼마나 떨어져 있는지를 나타내는 표시다. 현재 마이크로마우스 대회 참가자들은 칸이 목적지에서 가까울수록 칸의 무게가 무겁고, 멀어질수록 가벼워진다는 표현을 사용하고 있다. 무게중심법은 이러한 칸의 무게를 인식해 중앙에 있는 목적지에 도달하는 방법이다. 마이크로마우스는 무게중심법을 통해 가벼운 칸에서 무거운 칸으로 이동하면서 주행을 하게 된다.
마이크로마우스는 이러한 탐색 알고리즘을 활용해 탐색주행을 한다. 탐색주행은 마이크로마우스의 주행시간을 겨루는 본격적인 주행에 앞서 미로의 경로를 탐색하는 주행을 말한다. 현재 마이크로마우스 대회에서는 마이크로마우스의 주행횟수를 제한하지 않고 있고, 대부분의 참가자들은 본격적인 주행에 앞서 탐색주행을 실시한다.
탐색주행이 끝나면 마이크로마우스는 ‘피드백(feedback)과정’을 통해 주행기록을 향상시킨다. 피드백 과정은 탐색주행을 통해 입력된 정보를 바탕으로 새로운 정보를 생산하는 것이다. 이 과정을 통해 마이크로마우스는 최단 경로를 찾고, 직선주로에서는 속도를 올릴 수 있다.
‘라인트레이서’, 선을 따라 주행하라!
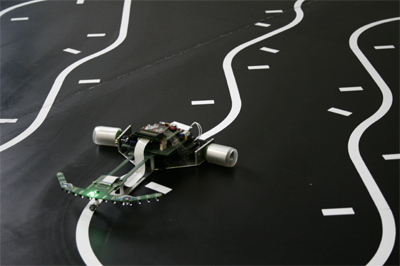
미로를 통과하는 마이크로마우스 외에도 ZETIN의 주력분야에는 라인트레이서가 있다. 라인트레이서는 선(line)과 추적자(tra cer)의 의미가 결합된 말로, 이를 종합해보면 ‘정해진 주행선을 따라 움직이는 로봇’이라는 의미가 된다. 현재 라인트레이서는 선을 따라 도착점에 빨리 도착하는 것을 목적으로 만들어지고 있다. 라인트레이서의 주행선은 시작점과 도착점이 같은 폐곡선 형태다.
이러한 라인트레이서의 주요 구성요소는 선을 인식하는 센서, 로봇을 움직이는 모터, 그리고 센서, 모터 등을 제어하는 초소형 컴퓨터 등이다. 라인트레이서는 과연 어떻게 선을 따라 목적지까지 도달할 수 있는 것일까.
경기 시작 전 라인트레이서의 컴퓨터에는 주행선, 출발지점의 위치 등을 인지하도록 하는 프로그램과 함께 주행 알고리즘이 입력된다. 구체적으로 주행 알고리즘은 센서에서 인식한 정보를 바탕으로 주행선과 검은색 배경을 구분하는 방법이다. 라인트레이서는 이러한 주행 알고리즘을 통해 경기장의 경로를 파악하는 1차 주행을 한다. 그러면 라인트레이서의 초소형 컴퓨터에는 주행선에 관한 정보가 입력된다. 이후 라인트레이서는 획득한 정보를 바탕으로 피드백 과정을 거쳐 새로운 정보를 만들어낸다. 이렇게 새로 형성된 정보들은 주로 곡선주로의 곡률을 판단하거나 로봇이 직선주로에서는 속도를 높이도록 유도하는 등 라인트레이서의 주행시간을 단축하는 데 활용된다.
앞으로도 활발한 활동을 이어나갈 ZETIN
현재 ZETIN은 ‘제9회 고려대학교 전국 마이크로마우스 경연대회’에서 최우수상을 수상했을 뿐만 아니라 ‘CIRO 2012 제11회 지능형 창작로봇 경연대회’라인트레이서(일반) 부문에서 우승할 정도로 뛰어난 성적을 거두고 있다. 이재영 회장은 “지금까지 ZETIN은 수많은 마이크로로봇연구회들 중에서도 상위권을 유지해왔다”며 “기존에 주로 연구했던 마이크로마우스와 라인트레이서 분야에만 머무르지 않고 솔라카(solar car)와 같은 새로운 로봇 분야에 도전해 기술적으로 더욱 발전한 ZETIN이 되겠다”며 앞으로의 각오를 밝혔다.
글_김현우 기자 hiun917@uos.ac.kr
사진_ZETIN 제공